Depending on the progress of the pipeline, 5 different dumps are executed:
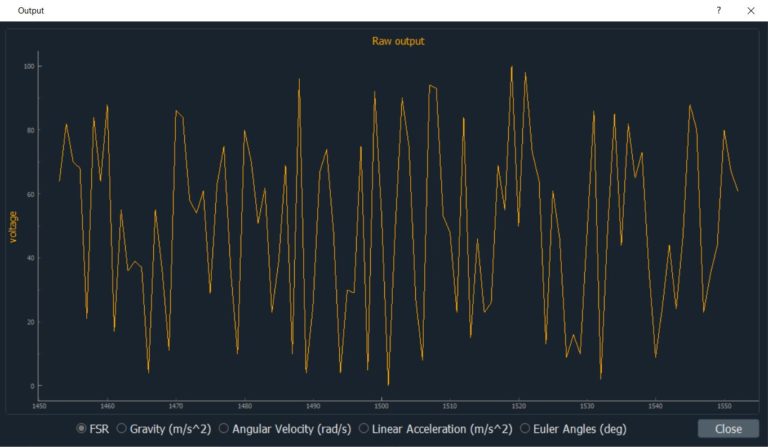
• Raw data.
• Calculated root mean square of data windows.
• Input for support vector machine, X and Y.
• Classifier model. (Saved with pickle as .sav).
• Testing data.
The name of the saved files can be explained like this:
[Date(YYYY_MM_DD)]_[Time(HHMM)]_[Data type]_[Gesture].[extension]
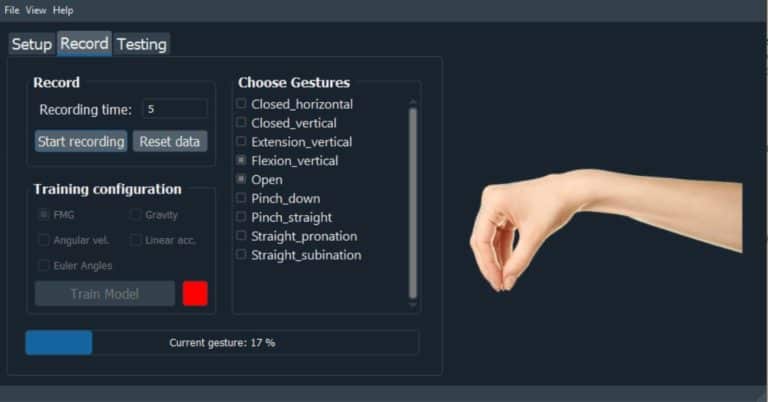
4.3 Adding or removing gestures
Step by step guide on how to remove gestures in the application:
Step 1:
Go to the folder on your computer where you have installed the application.
Step 2:
Choose the folder “hand_pic”. Here are the images of the saved gestures.
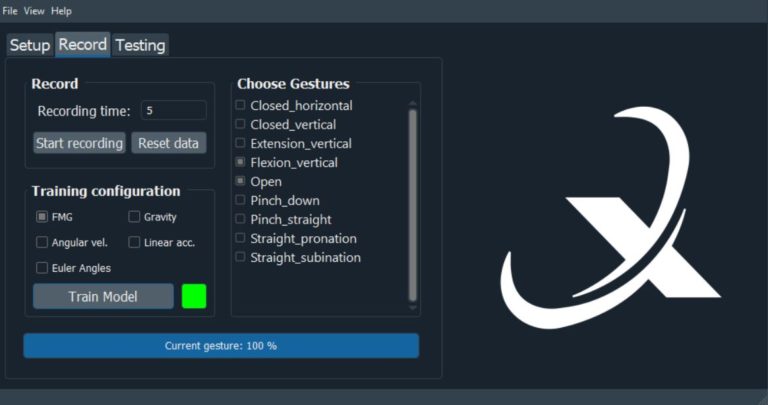
Step 3:
Adding: If you want to add a gesture you must copy an image into the folder. It is important that you name the image accordingly to what gesture it represents.
Step 4:
Removing: If you want to remove a gesture simply delete the image of the gesture that you no longer want to be included.
4.4 Other software for collecting data
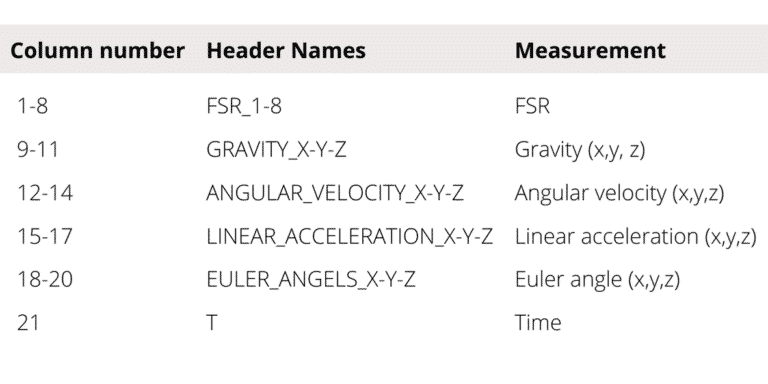
If the purpose of using the AAL-Band is simply to collect and plot data, there can be used the software either for MATLAB or Python to achieve this. The only thing that must be changed is for how long you want to collect data. In the MATLAB code this is done by changing the variable “time_to_record” which is in seconds. For the Python code the variable “sampletime” is changed. Both codes achieve the same, which is collecting the measurements of FSR, gravity, angular velocity, linear acceleration, Euler angels and time.
The software can be downloaded:
https://www.bioxgroup.dk/downloads/